

La potatura è una delle operazioni cruciali in vigna poiché getta le basi per la produttività futura del vigneto. Un'operazione delicata, in quanto selettiva, che dovrebbe essere effettuata da portatori esperti, in grado di "leggere" la vite e sapere esattamente dove tagliare per lasciare il numero corretto di gemme, nelle posizioni più appropriate, in modo da assicurare la produttività dell'anno successivo.
Tuttavia, trovare potatori non è così semplice, vista la cronica scarsità di manodopera qualificata. Per di più la potatura, eseguita durante l'inverno, è ripetitiva, potenzialmente pericolosa ed eseguita in condizioni ambientali sfavorevoli.
Robot, soluzione semplice
Per tutti questi motivi, sarebbe interessante avere a disposizione robot in grado di eseguire in maniera autonoma la potatura della vite, in modo da assicurare alle aziende vitivinicole l'esecuzione per tempo di una pratica delicata e al contempo eliminare il problema del reperimento di manodopera qualificata.
Basti pensare che per condurre un vigneto allevato a spalliera verticale servono circa trecento ore all'anno, di cui la gran parte viene oggi assorbita dalla raccolta delle uve e dalla potatura. Con la vendemmia meccanica si scende a circa 190 ore e le macchine in commercio offrono standard di qualità estremamente elevati. Per la potatura invece non ci sono macchine altrettanto efficienti.
Certo, per alcune tipologie di forme di allevamento, come il cordone speronato, ci sono delle macchine che pre potano la chioma, lasciando all'operatore il compito di passare a rifilare i cordoni decidendo quante e quali gemme lasciare, ma non si tratta di una operazione totalmente automatizzata.
Arriva Vinum, il robot che pota le viti
"Nel 2017 abbiamo firmato un protocollo d'intesa insieme all'Istituto Italiano di Tecnologia per sviluppare nuove tecnologie dedicate all'agricoltura, tra cui un robot dedicato alla potatura della vite", spiega Matteo Gatti, docente di Viticoltura presso l'Università Cattolica del Sacro Cuore di Piacenza.
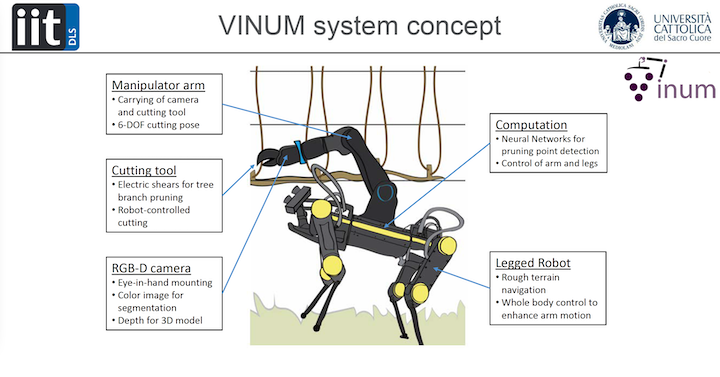
"Il progetto, iniziato nel 2018 e che si concluderà nel 2023, si chiama Vinum e ha proprio come obiettivo quello di sviluppare un robot in grado di muoversi in maniera autonoma all'interno di un vigneto, di identificare la vite e le varie componenti della chioma e di operare dei tagli selettivi come farebbe un portatore esperto".
La difficoltà maggiore sta nell'insegnare al robot ad identificare le varie parti di cui è composta la chioma della vite, selezionare i punti di taglio e pianificare i movimenti per portare la forbice nel punto esatto in cui deve essere reciso il tralcio.
Le caratteristiche di Vinum
(Fonte foto: Università Cattolica del Sacro Cuore)
Dal colpo d'occhio all'algoritmo
Quando un potatore si approccia ad una vite riconosce a colpo d'occhio quali sono i punti in cui tagliare. Si tratta spesso di un lavoro istintivo, frutto di anni di lavoro e di esperienza, che va al di là di processi decisionali consapevoli, spesso riservati solamente alle viti più difficili. In qualche modo l'operatore va in autonomia e ragiona sui tagli in maniera approfondita solamente quando una pianta è difficile da "leggere".
"Nel progetto Vinum abbiamo invece dovuto trasformare l'esperienza di un potatore in un algoritmo che potesse guidare il robot nelle varie fasi di potatura. Prima di tutto deve essere in grado di riconoscere le diverse componenti della pianta distinguendo le une dalle altre. In secondo luogo è necessario definire delle linee guida per capire quali parti tagliare", sottolinea Gatti.

L'algoritmo ha il compito di interpretare le immagini provenienti dai sensori e di identificare le varie parti della vite
(Fonte foto: Università Cattolica del Sacro Cuore)
Non dobbiamo dimenticare che una volta identificati i punti di intervento, il robot deve portare la forbice nel punto giusto per effettuare il taglio, operazione tutt'altro che semplice se si considera la complessità della chioma della vite, dove spesso i tagli si localizzano in posizioni scomode da raggiungere.
L'Istituto Italiano di Tecnologia ha messo poi a disposizione i suoi robot quadrupedi sviluppati dall'ingegnere Claudio Semini, degli automi della grandezza di un cane o poco più, dotati di quattro gambe e in grado di muoversi in maniera autonoma anche in terreni accidentati, essendo dotati di sensori in grado di interpretare il mondo che li circonda.
I robot quadrupedi
Serve la figura dell'ingegnere agronomo
Il progetto Vinum ha dovuto affrontare la difficoltà di far parlare due mondi completamente diversi: quello dell'ingegnere, abituato a lavorare in condizioni controllate, in cui spesso le variabili sono note. E quello dell'agronomo, che ha a che fare con qualcosa di vivo, che non si presenta mai due volte nella stessa forma e che è soggetto ad un numero talmente alto di variabili da rendere difficile ogni pianificazione.
Il progetto Vinum, che si concluderà nel 2023, è rappresentativo di una nuova tendenza che caratterizza l'innovazione in agricoltura, quella di mettere insieme conoscenze provenienti dagli ambiti più diversi, quali informatica, meccanica, fisica, biologia, agronomia, viticoltura, robotica e tanti altri ancora.























