

La 19esima edizione di Enovitis in Campo - andata in scena il 18 e 19 giugno 2025 tra i filari dell'azienda agricola Marramiero, in Abruzzo - ha messo in evidenza che la meccanizzazione agricola per la viticoltura è un vero e proprio laboratorio tecnologico.
Accanto a trattori specializzati e attrezzi per il vigneto hanno sfilato anche macchine autonome e robot agricoli. Nel panorama dell'innovazione, Merlo ha attirato l’attenzione con la nuova versione del prototipo di trasportatore cingolato elettrico e autonomo: il Self Driving Robot l'M01-e, che promette di rivoluzionare la gestione dei trattamenti e altre operazioni viticole.
Leggi anche Enovitis in Campo 2025, l'evoluzione dell'agromeccanica parte dal vigneto
Ulteriore novità dell'Azienda cuneese in mostra in vigna, il trasportatore Cingo 12.3 Evo Y presenta un motore più potente, un design rinnovato e un nuovo attacco a tre punti di categoria 1, introdotto per offrire il massimo della versatilità nelle lavorazioni.
Merlo Self Driving Robot M01-e è 100% elettrico
Nato da una collaborazione con il laboratorio mOve del Politecnico di Milano, il prototipo di Cingo autonomo ha debuttato a Enovitis in Campo 2023. Successivi aggiornamenti, soprattutto a livello di software, sono stati presentati all'edizione 2024, mentre in occasione di Enovitis in Campo 2025 il Cingo autonomo ha sfilato in una veste completamente rinnovata.
Guarda il nuovo prototipo di Self Driving Robot M01-e di Merlo a Enovitis in Campo 2025
Il Self Driving Robot M01-e, questo il nome ufficiale, è un trasportatore cingolato elettrico a guida autonoma equipaggiato con un atomizzatore per i trattamenti fitosanitari. Il prototipo, sempre più vicino a divenire operativo in campo, monta due motori elettrici, alimentati da una batteria agli ioni di litio, per l'azionamento dei cingoli e un ulteriore motore elettrico per la gestione dell'atomizzatore.
L'autonomia è di 5 ore di lavoro continuativo a pieno carico (600 chilogrammi). La ricarica richiede 2 ore circa e una presa di corrente CCS2, che corrisponde allo standard automobilistico.
Il robot ha due modalità di guida: radiocomandata e autonoma. Al primo utilizzo l'operatore si serve della modalità radiocomandata per mappare il percorso, che viene memorizzato ed elaborato per poi essere gestito in sicurezza in modalità autonoma.
Self Driving Robot M01-e, autonomia e sicurezza
Merlo ha aggiornato alcune tecnologie per rendere il robot adatto all'utilizzo in territori con forti pendenze. "Dopo una prima fase di sviluppo e affinamento del software, ora abbiamo una macchina che è già in fase operativa - afferma Andrea Giacosa dell'ufficio marketing e comunicazione di Merlo. Abbiamo abbassato il baricentro e allargato la carreggiata da 800 a 1.200 millimetri. In questo modo la macchina può affrontare in sicurezza anche pendii ripidi".

Il lancio sul mercato del nuovo prototipo Self Driving Robot M01-e di Merlo, in foto tra i filari dell'azienda agricola Marramiero, è previsto per il 2027
(Fonte foto: AgroNotizie)
Ulteriori migliorie apportate dai tecnici Merlo riguardano la sensoristica, aggiornata per garantire una maggiore sicurezza operativa. "Abbiamo montato sulla parte frontale della macchina un nuovo Lidar più potente, che serve a rilevare eventuali ostacoli lungo il percorso e consente al mezzo di fermarsi nel caso in cui se ne presenti uno, sia all’interno del filare che nelle svolte in capezzagna" spiega Giacosa.
"Inoltre, abbiamo integrato due nuove antenne GPS-RTK per una precisione centimetrica negli spostamenti e aggiunto dei bumper di arresto lungo tutta la larghezza della macchina. Tali elementi, in caso di contatto con un ostacolo, interrompono automaticamente l’avanzamento - sottolinea Giacosa. Altre novità sono il design e il software del radiocomando, sviluppati internamente dai nostri tecnici".
Cingo 12.3 Evo Y, ancora più versatile
Oltre al Cingo autonomo, Merlo ha aggiornato anche il suo trasportatore cingolato polivalente che ora si chiama M12.3 Evo Y. L'inedita versione monta un nuovo motore Yanmar da 24 cavalli che offre più potenza rispetto al precedente motore Kubota da 21 cavalli.

Il trasportatore polivalente Merlo Cingo 12.3 Evo Y monta un nuovo motore Yanmar da 24 cavalli
(Fonte foto: AgroNotizie)
"Questo upgrade di potenza non solo migliora le prestazioni, ma consente anche di lavorare a regimi più bassi, riducendo i consumi e aumentando l’efficienza nei contesti che richiedono maggiore potenza idraulica - dichiara Daniele Canova, Product manager Cingo e Tool Carriers. La portata di 1.200 chilogrammi resta invariata rispetto al modello base, ma l'impianto idraulico è stato migliorato per gestire attrezzature più esigenti".
Altre novità sono il serbatoio, ridisegnato in linea con l’estetica della gamma attuale, e l'attacco a tre punti di categoria 1, mai visto prima nella serie M12.3. "Il nuovo attacco amplia notevolmente la versatilità del modello M12.3 Evo, consentendo l’uso di una più vasta gamma di attrezzature agricole compatibili" commenta Canova.
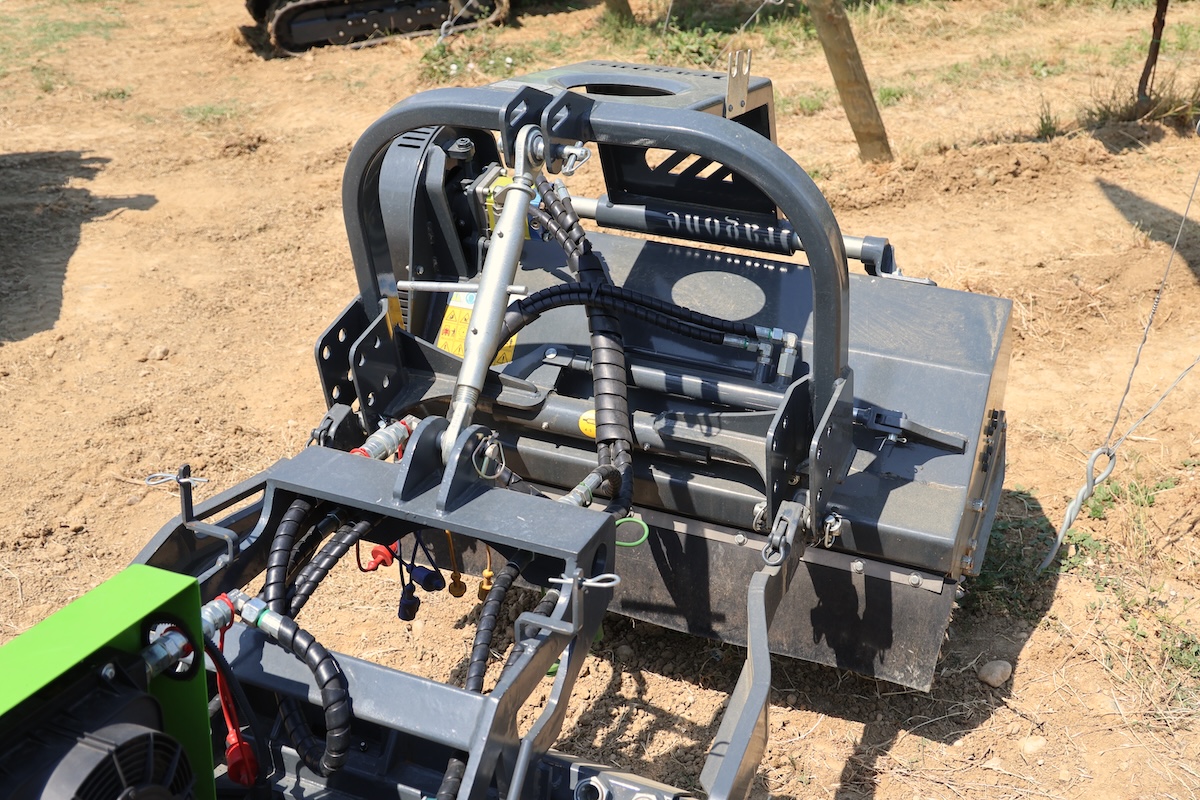
Dettaglio del nuovo attacco a tre punti del Cingo 12.3 Evo Y e della trincia forestale a martelli Dragone
(Fonte foto: AgroNotizie)
La versatilità del Cingo si estende anche all’ambito forestale: il modello M12.3 Evo Y ha sfilato a Enovitis in Campo con una trincia Dragone a martelli, dotata di spostamento laterale fino a 20 centimetri per lavorare fuori sagoma e in aree di difficile accesso. "Questo modello di Cingo, identificato dalla lettera Y nel nome, non sostituisce la versione standard con motore Kubota, ma offre un’alternativa pensata per chi ha esigenze più complesse in termini di potenza e compatibilità" conclude Canova.
























