Chi sviluppa robot per l’agricoltura ha davanti due grandi sfide (tra le tante): sviluppare macchine in grado di muoversi da sole in campo e attrezzi capaci di portare a termine autonomamente un compito.
Un esempio sono i robot per la raccolta della frutta, che avanzano da soli tra i filari, svoltando a fine campo, e allo stesso tempo sono in grado di individuare nella chioma degli alberi i frutti per poi raccoglierli.
Progettare, validare e produrre questi robot, nel loro complesso, è tuttavia estremamente difficile e costoso, specie per chi opera nelle colture specializzate o in viticoltura, dove serve una precisione centimetrica in ogni operazione.
Robot agricoli, divisione tra rover e attrezzature
Per questo motivo sta emergendo una nuova tendenza che vede la separazione tra chi produce i rover terrestri (dei porta-attrezzi a guida autonoma) e chi invece sviluppa l’attrezzo robotico per compiere la lavorazione richiesta (raccolta, irrorazione, monitoraggio, diserbo, etc.).
Durante il World Agri-Tech Innovation Summit, di cui AgroNotizie® è partner, erano almeno due le startup attive su questo fronte: Muddy Machines ed E-Terry. La prima è una startup britannica che ha messo a punto un rover porta-attrezzi del peso di 350 chilogrammi con un'autonomia di movimento di 16 ore in campo. Sprout, questo è il nome dato dagli inventori, ha al suo interno un capiente vano dove può essere alloggiato l’attrezzo.
Rover porta-attrezzi Sprout della startup britannica Muddy Machines
Muddy Machine propone un suo attuatore per la raccolta automatica degli asparagi grazie ad un sistema di riconoscimento delle immagini e ad un raccoglitore automatico. Ma potenzialmente nel vano può essere alloggiato qualunque tipo di sistema robotico.
Altra soluzione interessante è quella rappresentata da E-Terry, una startup tedesca che sta sviluppando un rover a 3 ruote in grado di gestire differenti altezze e larghezze di campo e di portare diverse tipologie di attrezzi. Il sistema è pensato per adattarsi a molteplici contesti e, grazie alle 3 ruote, è altamente manovrabile. Inoltre, pesa solo 250 chilogrammi ed è richiudibile, potendo essere trasportato in un piccolo van.
Allestimento e trasporto del rover a tre ruote E-Terry
Altra startup britannica che sta lavorando su questo concept è Saga Robotics, il cui robot più celebre è Thorvald, pensato per il trattamento di fragole e viti con raggi ultravioletti (contro la peronospora).
Thorvald è stato costruito con un approccio ‘modulare’. Gli ideatori spiegano che “Thorvald è un insieme di robot diversi in uno, costruiti tutti utilizzando gli stessi moduli di base e solo utensili di facile reperimento. I moduli sono progettati per rendere disponibili robot di alta qualità che possono essere rapidamente personalizzati per una determinata applicazione in un determinato ambiente, come serra, tunnel, campo aperto e vigneto”.
Navigazione autonoma, una questione di precisione
La guida autonoma in campo aperto è una tecnologia ormai ben rodata e diffusa, che trova applicazione soprattutto su colture estensive, specialmente in aree del Globo come il Nord America, dove i campi hanno forme regolari e sono di grandi dimensioni. Tale guida si basa sostanzialmente sull’uso del GNSS (Global navigation satellite system), come ad esempio il Gps, con una correzione RTK (Real-time kinematic) che consente di avere un margine di errore di pochi centimetri.
Leggi anche Oidio, i robot in difesa di viti e fragole
Ma quando si opera in colture specializzate, oppure in viticoltura o ancora all’interno delle serre, il segnale fornito dai satelliti e dalle antenne RTK non è più sufficiente (o non è disponibile). In questo caso servono una serie di sensori addizionali in grado di correggere la traiettoria del robot impedendogli di scontrarsi con la coltura o con ostacoli sul suo cammino.
In generale, tutti i rover porta-attrezzi elencati hanno:
- Un o più Lidar (Laser Imaging Detection and Ranging) in grado di ricreare un ‘digital-twin’ dell’ambiente circostante. Il Lidar è un sistema di rilevamento che utilizza un laser per misurare la distanza tra il robot e gli oggetti circostanti. Esso genera un fascio di luce che viene riflesso dagli oggetti e poi rilevato dal sensore stesso. Utilizzando la distanza rilevata tra l'emettitore laser e l'oggetto, il robot può ricostruire una mappa dell'ambiente circostante.
- Sensori ultrasonici, come quelli delle automobili che hanno la funzione di parcheggio assistito. Tali sensori misurano la distanza del rover da un oggetto e di solito vengono usati per impedire al porta-attrezzi di scontrarsi contro ostacoli imprevisti o contro le colture arboree.
- Camere RGB o 3D. I sensori ottici utilizzano una combinazione di due o più telecamere per catturare immagini dell'ambiente circostante. Utilizzando un software di elaborazione delle immagini, il robot può ricostruire una mappa 3D dell'ambiente circostante.
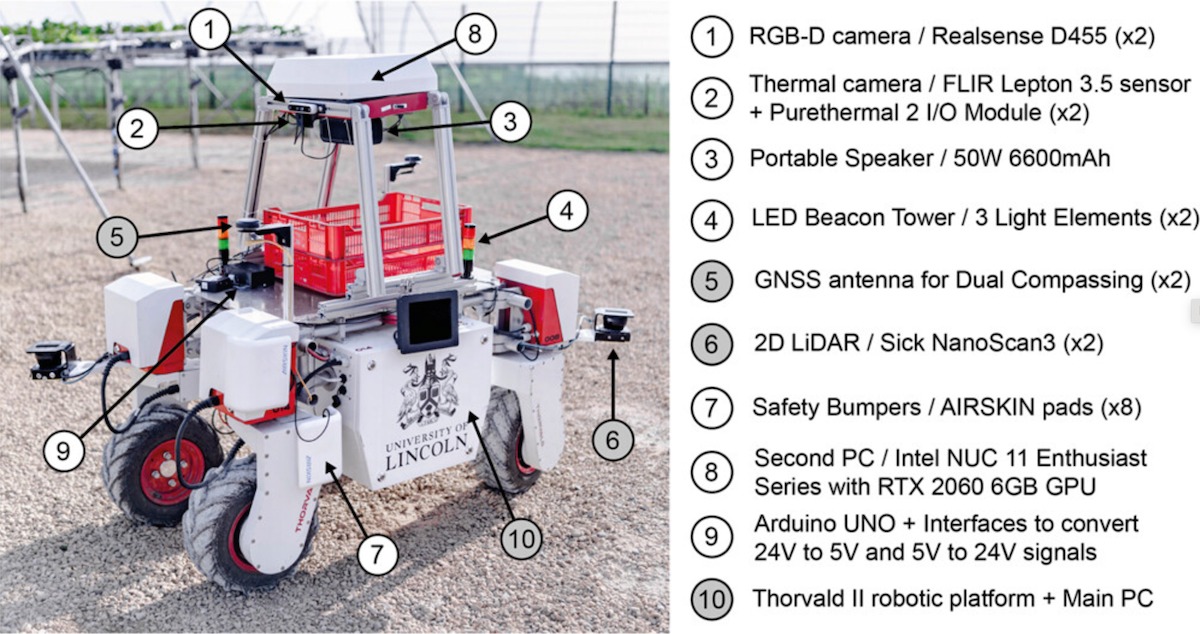
Il modulo di navigazione di Thorvald è stato modificato da un gruppo di ricerca dell'Universita di Lincoln per consentire la collaborazione uomo-macchina nella raccolta di piccoli frutti.
A lato le specifiche tecniche, tra cui quelle relative alla navigazione
(Fonte foto: University of Lincoln)
L’utilizzo di più sensori permette di avere una ridondanza delle informazioni e quindi di ottenere una maggiore accuratezza di navigazione. Ad esempio durante il crepuscolo le camere 3D possono lavorare non correttamente e una carenza di precisione può essere compensata dagli altri sensori. Il Lidar può essere ‘accecato’ dalla luce solare in certe condizioni, mentre i sensori ad ultrasuoni possono essere influenzati da rumori esterni, come quelli provenienti dalle macchine operatrici.
La ridondanza nei sistemi di navigazione autonoma permette di far muovere i rover con maggiore precisione all’interno di un ambiente agricolo complesso, consentendo di individuare ed evitare gli ostacoli e di continuare con le lavorazioni anche nel caso in cui un sistema di rilevamento fosse inutilizzabile.
Il fatto che ci siano startup che si concentrano su questi aspetti di navigazione in campo permette ad altri team di sviluppare gli attrezzi robotici, sollevandoli dall'onere di pensare ai sistemi di guida autonoma. Questo può facilitare la nascita di nuove soluzioni e accelerare l'adozione dei robot nelle aziende agricole.
AgroNotizie® è un marchio registrato da Image Line Srl Unipersonale