Carenza di manodopera - aggravata dalla crisi dovuta al coronavirus - cambiamenti climatici, necessità di aumentare la produttività e ridurre l'impatto ambientale. Queste sfide possono essere affrontate dal settore agricolo puntando su trattori ed attrezzi di ultima generazione, ma anche sui nuovi robot che permettono di lavorare con meno personale e in modo più efficiente e sostenibile.
Molti aspetti delle promettenti soluzioni robotiche sono ancora tutti da scoprire tramite attività di ricerca & sviluppo. Le più interessanti sono state illustrate in occasione dei workshop "Human - robot interaction and robotic application for agriculture" ed "Implement automation and coordination with robots for agriculture tasks achievement", organizzati durante la rassegna online Fira 2020 da RobAgri (associazione francese che promuove lo sviluppo della robotica agricola) ed Inrae (Istituto nazionale di ricerca per l'agricoltura, l'alimentazione e l'ambiente).
I ricercatori hanno identificato quattro aree d'azione chiave per l'innovazione responsabile: anticipazione, inclusione, riflessività e reattività. "Studiamo come i produttori possano prevedere le conseguenze delle tecnologie, coinvolgere gli stakeholder nella definizione della visione futura della robotica e riflettere su interventi utili a rendere i robot sicuri, affidabili" spiega Rose. "Inoltre, valutiamo come le istituzioni possano rispondere velocemente ai progressi tecnologici".
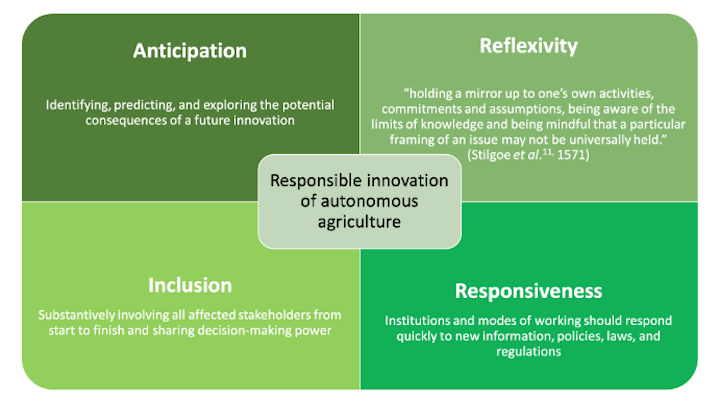
Azioni necessarie per promuovere l'innovazione responsabile
(Fonte foto: Università di Reading)
I prossimi passi sono il coinvolgimento degli operatori agricoli nelle dimostrazioni, il miglioramento della progettazione incentrata sull'utente e l'identificazione delle domande chiave per il proseguimento del programma di ricerca.
"Per rafforzare anche la sicurezza, i Secure platform laboratories di NTT - aggiunge Fumiaki Kudoh - hanno sviluppato una tecnologia leggera di autenticazione e autorizzazione basata sulla teoria crittografica, caratterizzata da ridotti volumi di comunicazione e adatta a mezzi autonomi che hanno Central processing unit Cpu, memoria limitate e operano in ambienti dove la comunicazione può essere rallentata". Da segnalare che la tecnologia NTT è applicabile ai robot come pure a sensori, webcam ed altri dispositivi in uso nei campi.

Prototipo AROX con navigazione sensibile al contesto
(Fonte foto: DFKI)
"Per sviluppare una soluzione che adatti gli schemi d'azione all'ambiente, monitori i campi e crei scansioni 3D durante un intero ciclo di vegetazione senza alcun intervento umano, abbiamo testato - specifica Benjamin Kisliuk del DFKI - il prototipo AROX (costituito dal robot e da un'infrastruttura per l'alloggiamento e la ricarica) in un'azienda agricola tedesca. Abbiamo usato un software basato sul Robot operating system Ros e una mappa geometrica dei dintorni con diverse informazioni semantiche e zone di navigazione per adattare la navigazione ad ogni contesto e realizzare la sensibilità desiderata".
I test hanno evidenziato che AROX è in grado di navigare in sicurezza attraverso differenti zone dell'ambiente. Per migliorare ulteriormente la sua autonomia a lungo termine sarà necessario realizzare un sistema di monitoraggio che, usando sensori e la mappa semantica combinata con un modello simbolico, consenta il rilevamento di comportamenti anormali o eventi imprevisti e il riconoscimento automatico degli stati del processo.
Le funzioni di rilevamento e neutralizzazione sono state prima verificate singolarmente. Dopo i risultati incoraggianti ottenuti in laboratorio nel rilevamento di tre specie di afidi e della peronospora della vite, i test si concentrano ora sull'individuazione della posizione esatta degli afidi con una telecamera basata sulla stereovisione (attiva nello spettro del visibile), sullo sviluppo di un algoritmo di Intelligenza artificiale e sul miglioramento del sistema per superare il problema dell'illuminazione naturale variabile.
Primo prototipo di robot del progetto GreenShield
(Fonte foto: centro di ricerca Ampère)
Le prove di neutralizzazione condotte con diversi tipi di sorgenti laser indicano che occorre una fluenza di 11 Joule per centimetro quadrato per ottenere una mortalità del 90% sugli afidi. Orientati con micro-specchi, i laser presentano un'elevata precisione quando gli afidi si trovano al centro dell'immagine. "Al primo robot mobile che ha effettuato il rilevamento di afidi su piante di fagioli si aggiungerà presto un secondo prototipo più maneggevole e stabile, che - fa sapere Arnaud Lelevé del centro di ricerca Ampère - monterà un modulo per la neutralizzazione dei parassiti tramite laser".
I ricercatori hanno studiato i circuiti sensomotori (sensorimotor loops) che collegano i sensori e le telecamere multispettrali agli attuatori dei sistemi robotici tramite diversi step decisionali e hanno testato i dispositivi in campo su Trektor. L'obiettivo è quello di aumentare la precisione degli interventi autonomi di diserbo sulla fila, sviluppando strumenti per il rilevamento e l'eradicazione delle infestanti, ma anche per l'ottimizzazione dei metodi di coltivazione.
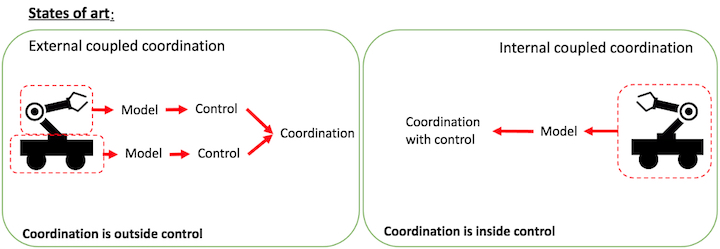
Due approcci per il controllo del coordinamento sui robot
(Fonte foto: Inrae)
L'approccio accoppiato internamente prevede la modellazione ed il controllo del sistema con un'unica legge, mentre l'approccio accoppiato esternamente propone il controllo di ogni sottosistema mediante leggi già esistenti e il coordinamento di tutte le parti ad un livello superiore.
"Più comune, l'approccio accoppiato internamente è generico, inadatto a gestire vari tipi di robot o strutture adattive e comporta la riprogettazione di modelli e leggi per ogni robot" spiega Guillaume Picard dell'Inrae. "Per creare una soluzione valida per le diverse strutture robotiche che operano in ambienti con dinamiche variabili e incerte, abbiamo testato l'approccio accoppiato esternamente che si è rivelato efficace su una piattaforma sperimentale che traccia la traiettoria in previsione di eseguire un trattamento lungo un filare".
Molti aspetti delle promettenti soluzioni robotiche sono ancora tutti da scoprire tramite attività di ricerca & sviluppo. Le più interessanti sono state illustrate in occasione dei workshop "Human - robot interaction and robotic application for agriculture" ed "Implement automation and coordination with robots for agriculture tasks achievement", organizzati durante la rassegna online Fira 2020 da RobAgri (associazione francese che promuove lo sviluppo della robotica agricola) ed Inrae (Istituto nazionale di ricerca per l'agricoltura, l'alimentazione e l'ambiente).
Responsabilità come punto di partenza
Robot e mezzi autonomi sono sempre più vicini all'adozione su larga scala nelle aziende agricole, ma il loro impiego pratico presenta pro e contro in termini sociali, etici, ambientali e legali. Per garantire il successo futuro, occorre - sostiene David Christian Rose dell'Università di Reading (Regno Unito), tra i partner del progetto Robot Highways - "puntare sullo sviluppo responsabile delle nuove tecnologie, facendo maggiore ricerca empirica per individuare modus operandi ben precisi".I ricercatori hanno identificato quattro aree d'azione chiave per l'innovazione responsabile: anticipazione, inclusione, riflessività e reattività. "Studiamo come i produttori possano prevedere le conseguenze delle tecnologie, coinvolgere gli stakeholder nella definizione della visione futura della robotica e riflettere su interventi utili a rendere i robot sicuri, affidabili" spiega Rose. "Inoltre, valutiamo come le istituzioni possano rispondere velocemente ai progressi tecnologici".
Azioni necessarie per promuovere l'innovazione responsabile
(Fonte foto: Università di Reading)
I prossimi passi sono il coinvolgimento degli operatori agricoli nelle dimostrazioni, il miglioramento della progettazione incentrata sull'utente e l'identificazione delle domande chiave per il proseguimento del programma di ricerca.
Controllo remoto e sicurezza, driver dell'automazione futura
Fondamentale anche porre la massima attenzione nello sviluppo delle tecnologie per l'interazione tra uomo e robot al lavoro, in primis quelle per il monitoraggio a distanza dei mezzi a guida autonoma e per la protezione da malfunzionamenti provocati da soggetti non autorizzati. Finora, l'R&D planning department della giapponese NTT Corp ha testato il sistema di comunicazione mobile 5G, la tecnologia di ottimizzazione della rete multipla e quella di posizionamento ad alta precisione per il controllo remoto dei robot, che così presentano un funzionamento stabile e regolare."Per rafforzare anche la sicurezza, i Secure platform laboratories di NTT - aggiunge Fumiaki Kudoh - hanno sviluppato una tecnologia leggera di autenticazione e autorizzazione basata sulla teoria crittografica, caratterizzata da ridotti volumi di comunicazione e adatta a mezzi autonomi che hanno Central processing unit Cpu, memoria limitate e operano in ambienti dove la comunicazione può essere rallentata". Da segnalare che la tecnologia NTT è applicabile ai robot come pure a sensori, webcam ed altri dispositivi in uso nei campi.
Ambiente mutevole? No problem
I sistemi robotici devono interagire con l'uomo come pure con l'agrosistema, ambiente non standardizzato, eterogeneo e soggetto a cambiamenti anche imprevisti. Molti - controllati a distanza o basati su una rappresentazione ambientale fissa - non possiedono ancora la flessibilità necessaria per lavorare autonomamente a lungo termine in uno scenario così complesso. Tuttavia, presto potrebbero fare passi avanti grazie alla navigazione sensibile al contesto, indagata nell'ambito di un progetto del centro di ricerca DFKI e dell'Università di Osnabruck.Prototipo AROX con navigazione sensibile al contesto
(Fonte foto: DFKI)
"Per sviluppare una soluzione che adatti gli schemi d'azione all'ambiente, monitori i campi e crei scansioni 3D durante un intero ciclo di vegetazione senza alcun intervento umano, abbiamo testato - specifica Benjamin Kisliuk del DFKI - il prototipo AROX (costituito dal robot e da un'infrastruttura per l'alloggiamento e la ricarica) in un'azienda agricola tedesca. Abbiamo usato un software basato sul Robot operating system Ros e una mappa geometrica dei dintorni con diverse informazioni semantiche e zone di navigazione per adattare la navigazione ad ogni contesto e realizzare la sensibilità desiderata".
I test hanno evidenziato che AROX è in grado di navigare in sicurezza attraverso differenti zone dell'ambiente. Per migliorare ulteriormente la sua autonomia a lungo termine sarà necessario realizzare un sistema di monitoraggio che, usando sensori e la mappa semantica combinata con un modello simbolico, consenta il rilevamento di comportamenti anormali o eventi imprevisti e il riconoscimento automatico degli stati del processo.
Difesa robotica "pesticide-free"
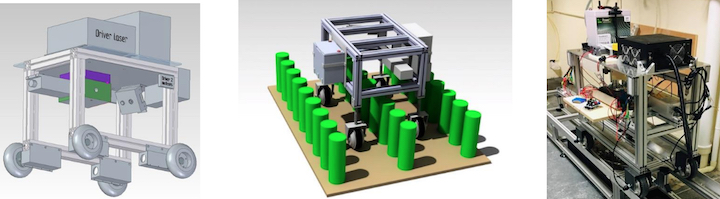
Una delle principali sfide che attende i mezzi autonomi pronti per l'ingresso in campo è la riduzione dell'uso di prodotti fitosanitari tramite l'individuazione precoce di parassiti o malattie e la loro eliminazione mirata. Dunque, nel 2017 quattro laboratori di ricerca (BF2I, INL, Femto-ST e Ampère) e la startup Green Shield Technology GST hanno avviato il progetto GreenShield per sviluppare un robot capace di scansionare le piante, rilevare parassiti o patogeni - raccogliendo dati utili per le campagne successive - e neutralizzarli con l'emissione di un raggio laser, soluzione già studiata per il diserbo e realizzata da GST.Le funzioni di rilevamento e neutralizzazione sono state prima verificate singolarmente. Dopo i risultati incoraggianti ottenuti in laboratorio nel rilevamento di tre specie di afidi e della peronospora della vite, i test si concentrano ora sull'individuazione della posizione esatta degli afidi con una telecamera basata sulla stereovisione (attiva nello spettro del visibile), sullo sviluppo di un algoritmo di Intelligenza artificiale e sul miglioramento del sistema per superare il problema dell'illuminazione naturale variabile.
Primo prototipo di robot del progetto GreenShield
(Fonte foto: centro di ricerca Ampère)
Le prove di neutralizzazione condotte con diversi tipi di sorgenti laser indicano che occorre una fluenza di 11 Joule per centimetro quadrato per ottenere una mortalità del 90% sugli afidi. Orientati con micro-specchi, i laser presentano un'elevata precisione quando gli afidi si trovano al centro dell'immagine. "Al primo robot mobile che ha effettuato il rilevamento di afidi su piante di fagioli si aggiungerà presto un secondo prototipo più maneggevole e stabile, che - fa sapere Arnaud Lelevé del centro di ricerca Ampère - monterà un modulo per la neutralizzazione dei parassiti tramite laser".
Diserbo, precisione in aumento
Giocheranno un ruolo chiave nel limitare l'uso di fitofarmaci anche l'individuazione delle infestanti e il loro controllo localizzato, oggetto del progetto Roseau a cura della Camera regionale francese, dell'Umr AgroEcologie, dell'Irseem e di Sitia, produttore del robot Trektor.I ricercatori hanno studiato i circuiti sensomotori (sensorimotor loops) che collegano i sensori e le telecamere multispettrali agli attuatori dei sistemi robotici tramite diversi step decisionali e hanno testato i dispositivi in campo su Trektor. L'obiettivo è quello di aumentare la precisione degli interventi autonomi di diserbo sulla fila, sviluppando strumenti per il rilevamento e l'eradicazione delle infestanti, ma anche per l'ottimizzazione dei metodi di coltivazione.
Robot: serve maggiore versatilità
In ogni caso, la diffusione della robotica passa dallo sviluppo di mezzi multitasking, più interessanti agli occhi degli agricoltori perché permettono di eseguire vari compiti e di ammortizzare meglio i costi di acquisto. Sulla base di studi sui manipolatori mobili su ruote (robot che offrono più modalità di azione) che aumentano la flessibilità operativa, sono stati proposti due approcci per controllare il coordinamento dei movimenti e risolvere la ridondanza (esistenza di più mezzi dedicati ad una funzione e disposti in modo tale che un guasto di un sistema possa verificarsi solo con il guasto contemporaneo di tutti i mezzi).Due approcci per il controllo del coordinamento sui robot
(Fonte foto: Inrae)
L'approccio accoppiato internamente prevede la modellazione ed il controllo del sistema con un'unica legge, mentre l'approccio accoppiato esternamente propone il controllo di ogni sottosistema mediante leggi già esistenti e il coordinamento di tutte le parti ad un livello superiore.
"Più comune, l'approccio accoppiato internamente è generico, inadatto a gestire vari tipi di robot o strutture adattive e comporta la riprogettazione di modelli e leggi per ogni robot" spiega Guillaume Picard dell'Inrae. "Per creare una soluzione valida per le diverse strutture robotiche che operano in ambienti con dinamiche variabili e incerte, abbiamo testato l'approccio accoppiato esternamente che si è rivelato efficace su una piattaforma sperimentale che traccia la traiettoria in previsione di eseguire un trattamento lungo un filare".