
L'attuale sviluppo dell'agricoltura di precisione, fondata sulla modulazione dell'apporto di input secondo le potenzialità produttive sito-specifiche, richiede sistemi di gestione delle operazioni colturali che siano in grado di garantire un'elevata accuratezza di posizionamento e preciso dosaggio di questi input, consentendo in questo modo un risparmio di risorse, tempo necessario alle operazioni e a una riduzione dell'impatto ambientale delle operazioni di campo.
In futuro, per far fronte alle sfide che attendono l'agricoltura, saranno necessari ulteriori salti tecnologici del settore per migliorarne l'efficienza operativa ed economica e, in questo senso, è ragionevole attendersi un aumento delle applicazioni di robotica volte ad ottimizzare ulteriormente l'utilizzo degli input, elevando l'attuale risoluzione spazio-temporale tipica degli approcci dell'agricoltura di precisione odierni, quantificabile nell'ordine delle decine di metri quadrati o più, verso soglie che si potrebbero definire proprie di un'agricoltura di ultra-precisione, dove il target dell'intervento potrebbe essere la singola pianta o addirittura singoli organi, come per esempio la singola foglia o un particolare frutto.
In questo contesto di innovazione e maggiore integrazione della tecnologia con le conoscenze necessarie alla gestione ottimizzata delle colture, potrebbe essere cruciale disporre di grandi volumi di dati acquisiti con elevata risoluzione spaziale e temporale, in modo da rendere possibile l'ottimizzazione delle decisioni basandosi su più livelli informativi. Da tali decisioni scaturirebbero, eventualmente anche in tempo reale, le modalità con cui svolgere operazioni colturali o interventi mirati dotati di grande precisione spaziale e temporale, talmente tempestivi da poter essere effettuati contestualmente al rilievo e non tramite post-processing di dati come spesso avviene nelle metodologie dell'agricoltura di precisione odierna.
Considerando la scala di lavoro dell'attività agricola, tra le possibili applicazioni robotiche è interessante considerare l'impiego dei cable driven parallel robot o più semplicemente, cable robot, ovvero macchine capaci di movimentare carichi, anche di entità notevole e su ampie distanze, per mezzo di cavi flessibili, manovrando lo spostamento tridimensionale di una piccola piattaforma, chiamata tecnicamente end effector, nello spazio. A bordo di questa piattaforma è possibile montare diverse tipologie di sensori utili a valutare differenti aspetti fisici della coltura, compiendo azioni di monitoraggio ad elevatissima precisione spaziale, così come strumenti capaci di svolgere direttamente operazioni colturali mirate, quali ad esempio trattamenti selettivi sulla coltura, anche in caso di inaccessibilità del campo per la taglia delle piante o quando le condizioni del fondo non lo permettono.
Questa tesi ha avuto come obiettivo la progettazione e la realizzazione di un prototipo di cable robot a scala di laboratorio in grado di compiere una missione di monitoraggio con scansione del volume di lavoro mediante un sensore ad ultrasuoni avente lo scopo di rilevare la presenza di elementi al suo interno, stimarne la loro posizione siano essi piante o vasi target e compiere un intervento diretto come per esempio una fertirrigazione ad elevata precisione.
L'architettura generale del sistema è basata su un controllo di tipo distribuito, basato cioè su una rete di elementi interconnessi e coordinati da un computer centrale definito nodo master. Ogni elemento di questa rete è gestito localmente da microcontrollori low-cost del tipo Arduino Uno che rappresentano i nodi slave. Questi microcontrollori, programmabili mediante l'ambiente di sviluppo dedicato, sono stati interconnessi per mezzo di una rete gestita mediante protocollo Can Bus, lo standard universalmente adottato nelle macchine e impianti agricoli per la sua modularità e versatilità di funzionamento, in grado di garantire il funzionamento del cable robot in maniera efficace ed economica. La gestione complessiva della rete, ad opera del master, è stata demandata ad un PC e ad un algoritmo di controllo e gestione realizzato per lo scopo nell'ambiente di programmazione MatLab.
La parte hardware del prototipo è composta dalla struttura di supporto, o frame, realizzata con profilati in alluminio con dimensioni di massima indicate in figura 1. A questa struttura sono ancorate le singole unità motrici principali, ognuna composta da: interfaccia Can Bus, utile ad interfacciare il nodo con la rete di trasmissione dei dati; motore elettrico da 12 V in corrente continua, collegato a una puleggia su cui viene avvolto il cavo di trazione; un encoder, utile a monitorare la posizione angolare del motore e due microcontrollori Arduino, necessari a gestire il corretto funzionamento del singolo nodo.
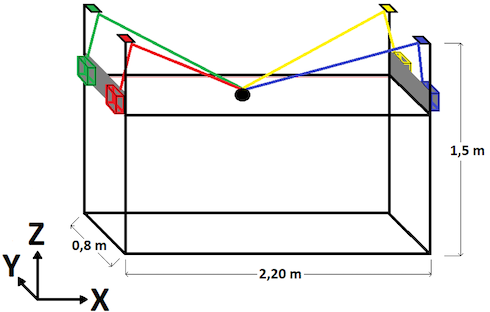
Figura 1. Schema di massima del prototipo
(Fonte: © Marco Davide Michel Torrente)
I quattro nodi principali così composti sono necessari per consentire lo spostamento dell'end effector all'interno dello spazio di lavoro, variando opportunamente le lunghezze dei cavi di trazione.
Oltre ai quattro nodi principali fanno parte del prototipo anche: un controller, utile a gestire gli input dell'operatore durante lo svolgimento delle operazioni preliminari di calibrazione del sistema e di selezione delle modalità di funzionamento.
Il sistema è in grado di gestire anche le funzioni dell'end effector, elemento costituito da: un microcontrollore necessario alla gestione complessiva di quest'ultimo; cinque servomotori, utili a garantirne il corretto puntamento e stabilizzazione; una coppia di sensori ad ultrasuoni per consentire di valutare le distanze e un'interfaccia Bluetooth per inviare e ricevere dati dal nodo master senza la necessità di utilizzare cavi per la trasmissione.
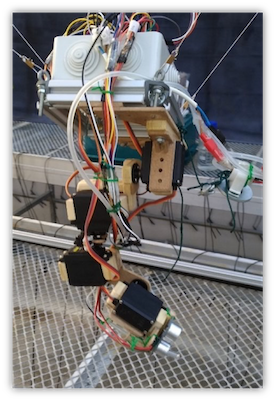
Figura 2. End effector
(Fonte: © Marco Davide Michel Torrente)
Il prototipo così costituito, è stato sottoposto ad alcune prove sperimentali, finalizzate a validarne l'effettiva funzionalità. Tali prove hanno riguardato: l'affidabilità di posizionamento dell'end effector all'interno del volume di lavoro; la scansione dello spazio di lavoro mediante un semplice sensore a ultrasuoni con lo scopo di ricostruire tridimensionalmente la mappa di occupazione dell'area di lavoro, individuando la posizione di bersagli (piante di cetriolo in vaso) o di ostacoli presenti al suo interno, applicando e confrontando due diversi metodi di analisi geometrica; una missione di lunga durata con interventi di fertirrigazione di precisione su piante di cetriolo in serra.
Dalle prove sperimentali volte a valutarne l'accuratezza di posizionamento è emerso che nel 70% circa delle prove di posizionamento, i cui risultati sono riportati in figura 3, l'errore di posizionamento assoluto misurato è stato inferiore al centimetro e che questo errore si concentrava maggiormente nelle zone dello spazio di lavoro prossime ai bordi di quest'ultimo.
Il grafico polare in figura 3 presenta una scala esterna che rappresenta l'orientamento azimutale espresso in gradi mentre la scala interna rappresenta la distanza, espressa in metri, rispetto al punto di arresto ottimale. La prova è stata svolta in due esperimenti separati in cui sono stati inseriti 100 punti target da raggiungere per ciascuno.
Ogni volta che l'end effector, per questo esperimento rappresentato da un puntatore, si arrestava nel punto target, veniva registrata la posizione del puntatore rispetto al punto voluto e definito di conseguenza l'errore di posizionamento.
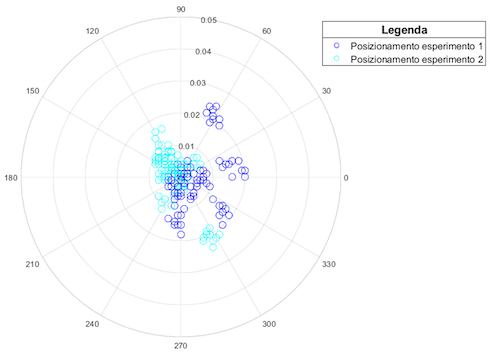
Figura 3. Risultato prove di accuratezza di posizionamento
(Fonte: © Marco Davide Michel Torrente)
Nella figura 4, invece, vengono proposti i risultati ottenuti durante le prove di validazione volte a verificare l'effettiva funzionalità pratica del prototipo. Viene riportata la mappa di occupazione dello spazio di lavoro ottenuta mediante la missione di monitoraggio con il rilievo dello spazio di lavoro all'interno del quale sono stati disposti allo scopo alcuni vasi. Dall'analisi dei dati raccolti e rielaborati in questa fase è possibile riprodurre la superficie dello spazio di lavoro ricavata mediante la scansione e utilizzata successivamente per stimare la posizione dei vasi, ovvero i possibili target da raggiungere compiendo l'opportuna traiettoria durante l'intervento successivo di fertirrigazione.
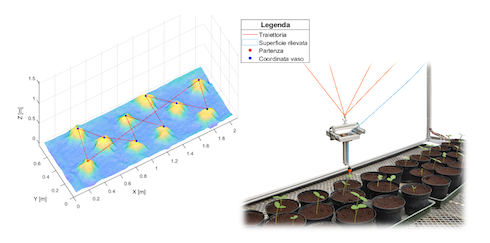
Figura 4. A sinistra: risultato della scansione a ultrasuoni dello spazio di lavoro e traiettoria intervento; a destra: esecuzione dell'intervento di fertirrigazione di precisione
(Fonte: © Marco Davide Michel Torrente)
In termini generali è parso molto interessante che i componenti hardware impiegati, nonostante la loro semplicità tecnologica e il costo molto contenuto, abbiano consentito di realizzare il prototipo e di raggiungere gli obiettivi di controllo della navigazione completamente autonoma e precisione di posizionamento attesi.
Dall'analisi dei risultati ottenuti nei test di laboratorio e di serra è emerso in primo luogo come l'accuratezza e la precisione di posizionamento raggiunte dall'end effector siano perfettamente compatibili con gli obiettivi preposti e con le esigenze del settore agricolo anche in vista di un'ipotetica applicazione di questa tipologia di manipolatori per compiere azioni di monitoraggio ed intervento ad elevatissima precisione sulla coltura.
Risulta interessante inoltre la possibilità di ampliare in maniera relativamente semplice la scala dimensionale del prototipo sostituendo gli attuatori con altrettanti dotati di maggiore potenza e adeguando opportunamente la dimensione dei cavi di trazione, mantenendo invariato il software che gestisce la cinematica dell'effettore finale.
Aumentando le dimensioni del volume di lavoro, una macchina di questo genere potrebbe essere impiegata in applicazioni di serra con piante molto dense, o anche in pieno campo su piante di alto fusto come mais ad esempio, oppure in vigneto e frutteto dove la presenza di filari potrebbe facilitare l'installazione della struttura portante.
In campo, per esempio, potrebbe risultare utile a garantire l'accessibilità ad esso anche durante stadi avanzati di crescita della coltura, per permettere l'esecuzione di alcune operazioni senza avere un compattamento del suolo, garantire rapidità di revisiting di punti specifici ed elevatissima accuratezza di posizionamento.
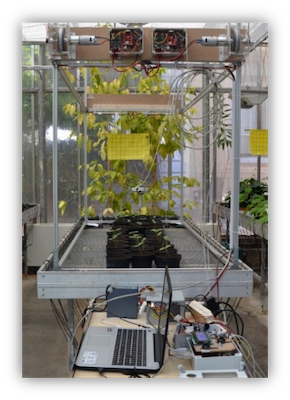
Figura 5. Visione d'insieme del prototipo
(Fonte: © Marco Davide Michel Torrente)
Un ulteriore elemento di interesse è stato l'utilizzo del protocollo Can Bus per la gestione della rete di comunicazione dei dati che garantiscono sia il corretto posizionamento angolare dei motori, dunque la cinematica dell'effettore, che la ricezione dei dati provenienti dai sensori a bordo dell'end effector. Tale protocollo potenzialmente è in grado di garantire, oltre alla possibilità di implementare in maniera semplice altri componenti compatibili con questo protocollo, elevata modularità e riconfigurabilità alla macchina consentendo l'aggiunta di nodi alla rete e quindi componenti, siano essi sensori o attuatori, senza rendere necessarie grosse modifiche sia a livello hardware che software.
Per possibili sviluppi futuri e sperimentare applicazioni pratiche, sarebbe innanzitutto necessario ampliare il raggio d'azione della macchina e ottimizzarne la geometria e il funzionamento a seconda dei tasks che dovrà svolgere.
Il prototipo risulta inoltre interessante anche per le notevoli potenzialità di ottimizzazione e di sviluppo di ulteriori funzionalità per mezzo dell'aumento del livello qualitativo dei sensori a bordo dell'end effector.
Tali sensori permetterebbero di garantire una più elevata qualità dei dati ottenuti durante le azioni di monitoraggio e intervento attivo, aumentando di conseguenza la qualità e la quantità delle funzioni implementabili. Ad esempio, dotando l'end effector di sensori time of flight (tof), capaci di valutare la distanza degli elementi che riescono a rilevare o di sensori come videocamere in grado di catturare immagini sarebbe possibile sfruttare le funzionalità offerte da MatLab, specie per ciò che attiene all'implementazione delle reti neurali, utili ad integrare sistemi di intelligenza artificiale per esempio con il sistema di navigazione, conferendo potenzialmente al sistema la possibilità di rilevare e riconoscere in maniera autonoma eventuali target da raggiungere od ostacoli presenti nel campo di azione dell'end effector.

Marco Davide Michel Torrente, categoria "Ingegneria agraria e meccatronica"
(Fonte: © Marco Davide Michel Torrente)
Scarica la tesi completa di Marco Torrente
Per eventuali contatti: marco.torrente@unimi.it
AgroInnovation Award è il premio di laurea istituito da Image Line in collaborazione con l'Accademia dei Georgofili al fine di promuovere la diffusione di approcci innovativi, strumenti digitali e l'utilizzo di internet in agricoltura.

Leggi le tesi vincitrici della terza edizione.
In futuro, per far fronte alle sfide che attendono l'agricoltura, saranno necessari ulteriori salti tecnologici del settore per migliorarne l'efficienza operativa ed economica e, in questo senso, è ragionevole attendersi un aumento delle applicazioni di robotica volte ad ottimizzare ulteriormente l'utilizzo degli input, elevando l'attuale risoluzione spazio-temporale tipica degli approcci dell'agricoltura di precisione odierni, quantificabile nell'ordine delle decine di metri quadrati o più, verso soglie che si potrebbero definire proprie di un'agricoltura di ultra-precisione, dove il target dell'intervento potrebbe essere la singola pianta o addirittura singoli organi, come per esempio la singola foglia o un particolare frutto.
In questo contesto di innovazione e maggiore integrazione della tecnologia con le conoscenze necessarie alla gestione ottimizzata delle colture, potrebbe essere cruciale disporre di grandi volumi di dati acquisiti con elevata risoluzione spaziale e temporale, in modo da rendere possibile l'ottimizzazione delle decisioni basandosi su più livelli informativi. Da tali decisioni scaturirebbero, eventualmente anche in tempo reale, le modalità con cui svolgere operazioni colturali o interventi mirati dotati di grande precisione spaziale e temporale, talmente tempestivi da poter essere effettuati contestualmente al rilievo e non tramite post-processing di dati come spesso avviene nelle metodologie dell'agricoltura di precisione odierna.
Considerando la scala di lavoro dell'attività agricola, tra le possibili applicazioni robotiche è interessante considerare l'impiego dei cable driven parallel robot o più semplicemente, cable robot, ovvero macchine capaci di movimentare carichi, anche di entità notevole e su ampie distanze, per mezzo di cavi flessibili, manovrando lo spostamento tridimensionale di una piccola piattaforma, chiamata tecnicamente end effector, nello spazio. A bordo di questa piattaforma è possibile montare diverse tipologie di sensori utili a valutare differenti aspetti fisici della coltura, compiendo azioni di monitoraggio ad elevatissima precisione spaziale, così come strumenti capaci di svolgere direttamente operazioni colturali mirate, quali ad esempio trattamenti selettivi sulla coltura, anche in caso di inaccessibilità del campo per la taglia delle piante o quando le condizioni del fondo non lo permettono.
Questa tesi ha avuto come obiettivo la progettazione e la realizzazione di un prototipo di cable robot a scala di laboratorio in grado di compiere una missione di monitoraggio con scansione del volume di lavoro mediante un sensore ad ultrasuoni avente lo scopo di rilevare la presenza di elementi al suo interno, stimarne la loro posizione siano essi piante o vasi target e compiere un intervento diretto come per esempio una fertirrigazione ad elevata precisione.
L'architettura generale del sistema è basata su un controllo di tipo distribuito, basato cioè su una rete di elementi interconnessi e coordinati da un computer centrale definito nodo master. Ogni elemento di questa rete è gestito localmente da microcontrollori low-cost del tipo Arduino Uno che rappresentano i nodi slave. Questi microcontrollori, programmabili mediante l'ambiente di sviluppo dedicato, sono stati interconnessi per mezzo di una rete gestita mediante protocollo Can Bus, lo standard universalmente adottato nelle macchine e impianti agricoli per la sua modularità e versatilità di funzionamento, in grado di garantire il funzionamento del cable robot in maniera efficace ed economica. La gestione complessiva della rete, ad opera del master, è stata demandata ad un PC e ad un algoritmo di controllo e gestione realizzato per lo scopo nell'ambiente di programmazione MatLab.
La parte hardware del prototipo è composta dalla struttura di supporto, o frame, realizzata con profilati in alluminio con dimensioni di massima indicate in figura 1. A questa struttura sono ancorate le singole unità motrici principali, ognuna composta da: interfaccia Can Bus, utile ad interfacciare il nodo con la rete di trasmissione dei dati; motore elettrico da 12 V in corrente continua, collegato a una puleggia su cui viene avvolto il cavo di trazione; un encoder, utile a monitorare la posizione angolare del motore e due microcontrollori Arduino, necessari a gestire il corretto funzionamento del singolo nodo.
Figura 1. Schema di massima del prototipo
(Fonte: © Marco Davide Michel Torrente)
I quattro nodi principali così composti sono necessari per consentire lo spostamento dell'end effector all'interno dello spazio di lavoro, variando opportunamente le lunghezze dei cavi di trazione.
Oltre ai quattro nodi principali fanno parte del prototipo anche: un controller, utile a gestire gli input dell'operatore durante lo svolgimento delle operazioni preliminari di calibrazione del sistema e di selezione delle modalità di funzionamento.
Il sistema è in grado di gestire anche le funzioni dell'end effector, elemento costituito da: un microcontrollore necessario alla gestione complessiva di quest'ultimo; cinque servomotori, utili a garantirne il corretto puntamento e stabilizzazione; una coppia di sensori ad ultrasuoni per consentire di valutare le distanze e un'interfaccia Bluetooth per inviare e ricevere dati dal nodo master senza la necessità di utilizzare cavi per la trasmissione.
Figura 2. End effector
(Fonte: © Marco Davide Michel Torrente)
Il prototipo così costituito, è stato sottoposto ad alcune prove sperimentali, finalizzate a validarne l'effettiva funzionalità. Tali prove hanno riguardato: l'affidabilità di posizionamento dell'end effector all'interno del volume di lavoro; la scansione dello spazio di lavoro mediante un semplice sensore a ultrasuoni con lo scopo di ricostruire tridimensionalmente la mappa di occupazione dell'area di lavoro, individuando la posizione di bersagli (piante di cetriolo in vaso) o di ostacoli presenti al suo interno, applicando e confrontando due diversi metodi di analisi geometrica; una missione di lunga durata con interventi di fertirrigazione di precisione su piante di cetriolo in serra.
Dalle prove sperimentali volte a valutarne l'accuratezza di posizionamento è emerso che nel 70% circa delle prove di posizionamento, i cui risultati sono riportati in figura 3, l'errore di posizionamento assoluto misurato è stato inferiore al centimetro e che questo errore si concentrava maggiormente nelle zone dello spazio di lavoro prossime ai bordi di quest'ultimo.
Il grafico polare in figura 3 presenta una scala esterna che rappresenta l'orientamento azimutale espresso in gradi mentre la scala interna rappresenta la distanza, espressa in metri, rispetto al punto di arresto ottimale. La prova è stata svolta in due esperimenti separati in cui sono stati inseriti 100 punti target da raggiungere per ciascuno.
Ogni volta che l'end effector, per questo esperimento rappresentato da un puntatore, si arrestava nel punto target, veniva registrata la posizione del puntatore rispetto al punto voluto e definito di conseguenza l'errore di posizionamento.
Figura 3. Risultato prove di accuratezza di posizionamento
(Fonte: © Marco Davide Michel Torrente)
Nella figura 4, invece, vengono proposti i risultati ottenuti durante le prove di validazione volte a verificare l'effettiva funzionalità pratica del prototipo. Viene riportata la mappa di occupazione dello spazio di lavoro ottenuta mediante la missione di monitoraggio con il rilievo dello spazio di lavoro all'interno del quale sono stati disposti allo scopo alcuni vasi. Dall'analisi dei dati raccolti e rielaborati in questa fase è possibile riprodurre la superficie dello spazio di lavoro ricavata mediante la scansione e utilizzata successivamente per stimare la posizione dei vasi, ovvero i possibili target da raggiungere compiendo l'opportuna traiettoria durante l'intervento successivo di fertirrigazione.
Figura 4. A sinistra: risultato della scansione a ultrasuoni dello spazio di lavoro e traiettoria intervento; a destra: esecuzione dell'intervento di fertirrigazione di precisione
(Fonte: © Marco Davide Michel Torrente)
In termini generali è parso molto interessante che i componenti hardware impiegati, nonostante la loro semplicità tecnologica e il costo molto contenuto, abbiano consentito di realizzare il prototipo e di raggiungere gli obiettivi di controllo della navigazione completamente autonoma e precisione di posizionamento attesi.
Dall'analisi dei risultati ottenuti nei test di laboratorio e di serra è emerso in primo luogo come l'accuratezza e la precisione di posizionamento raggiunte dall'end effector siano perfettamente compatibili con gli obiettivi preposti e con le esigenze del settore agricolo anche in vista di un'ipotetica applicazione di questa tipologia di manipolatori per compiere azioni di monitoraggio ed intervento ad elevatissima precisione sulla coltura.
Risulta interessante inoltre la possibilità di ampliare in maniera relativamente semplice la scala dimensionale del prototipo sostituendo gli attuatori con altrettanti dotati di maggiore potenza e adeguando opportunamente la dimensione dei cavi di trazione, mantenendo invariato il software che gestisce la cinematica dell'effettore finale.
Aumentando le dimensioni del volume di lavoro, una macchina di questo genere potrebbe essere impiegata in applicazioni di serra con piante molto dense, o anche in pieno campo su piante di alto fusto come mais ad esempio, oppure in vigneto e frutteto dove la presenza di filari potrebbe facilitare l'installazione della struttura portante.
In campo, per esempio, potrebbe risultare utile a garantire l'accessibilità ad esso anche durante stadi avanzati di crescita della coltura, per permettere l'esecuzione di alcune operazioni senza avere un compattamento del suolo, garantire rapidità di revisiting di punti specifici ed elevatissima accuratezza di posizionamento.
Figura 5. Visione d'insieme del prototipo
(Fonte: © Marco Davide Michel Torrente)
Un ulteriore elemento di interesse è stato l'utilizzo del protocollo Can Bus per la gestione della rete di comunicazione dei dati che garantiscono sia il corretto posizionamento angolare dei motori, dunque la cinematica dell'effettore, che la ricezione dei dati provenienti dai sensori a bordo dell'end effector. Tale protocollo potenzialmente è in grado di garantire, oltre alla possibilità di implementare in maniera semplice altri componenti compatibili con questo protocollo, elevata modularità e riconfigurabilità alla macchina consentendo l'aggiunta di nodi alla rete e quindi componenti, siano essi sensori o attuatori, senza rendere necessarie grosse modifiche sia a livello hardware che software.
Per possibili sviluppi futuri e sperimentare applicazioni pratiche, sarebbe innanzitutto necessario ampliare il raggio d'azione della macchina e ottimizzarne la geometria e il funzionamento a seconda dei tasks che dovrà svolgere.
Il prototipo risulta inoltre interessante anche per le notevoli potenzialità di ottimizzazione e di sviluppo di ulteriori funzionalità per mezzo dell'aumento del livello qualitativo dei sensori a bordo dell'end effector.
Tali sensori permetterebbero di garantire una più elevata qualità dei dati ottenuti durante le azioni di monitoraggio e intervento attivo, aumentando di conseguenza la qualità e la quantità delle funzioni implementabili. Ad esempio, dotando l'end effector di sensori time of flight (tof), capaci di valutare la distanza degli elementi che riescono a rilevare o di sensori come videocamere in grado di catturare immagini sarebbe possibile sfruttare le funzionalità offerte da MatLab, specie per ciò che attiene all'implementazione delle reti neurali, utili ad integrare sistemi di intelligenza artificiale per esempio con il sistema di navigazione, conferendo potenzialmente al sistema la possibilità di rilevare e riconoscere in maniera autonoma eventuali target da raggiungere od ostacoli presenti nel campo di azione dell'end effector.
Marco Davide Michel Torrente, categoria "Ingegneria agraria e meccatronica"
(Fonte: © Marco Davide Michel Torrente)
Scarica la tesi completa di Marco Torrente
Per eventuali contatti: marco.torrente@unimi.it
AgroInnovation Award è il premio di laurea istituito da Image Line in collaborazione con l'Accademia dei Georgofili al fine di promuovere la diffusione di approcci innovativi, strumenti digitali e l'utilizzo di internet in agricoltura.
Leggi le tesi vincitrici della terza edizione.
© AgroNotizie - riproduzione riservata
Fonte: Agronotizie
























