La raccolta delle mele è un argomento davvero antichissimo, basti pensare a come sono comunemente rappresentati Adamo ed Eva nella storia dell'arte: intenti a cogliere una mela.
Un gesto ripetuto infinite volte nel corso della storia che nei secoli l'uomo ha affinato ma che è comunque rimasta, come del resto accade per molti altri frutti, una operazione per lo più manuale.
I robot e le mele
Oggi è in atto un cambiamento. Viste le sempre maggiori esigenze produttive, l'aumento dei costi e l'endemica carenza di manodopera agricola, si inizia a pensare a nuove soluzioni. Alcune di queste sono state presentate nel corso di Interpoma 2022 durante il convegno "Interpoma Congress 2022 - I robot da raccolta" che ha riunito a Bolzano i principali produttori di robot per la raccolta delle mele a livello mondiale.
Una lunga storia
La raccolta rappresenta la fase produttiva più costosa per la coltivazione della mela e di numerosi atri frutti, essendo una fase ad oggi ancora poco meccanizzata.
"Nonostante possa sembrare innovativa la storia dei robot per la raccolta della frutta inizia nel 1987 con l'introduzione del primo prototipo di braccio meccanico prensile. I limiti applicativi erano ancora numerosi e l'efficienza molto bassa" spiega Luigi Manfrini, docente dell'Università di Bologna. "Le tecnologie si sono evolute e oggi, qui in questo convegno, sono presenti ben 7 realtà con soluzioni concrete e funzionali per la raccolta automatizzata in frutteto"

Gli speaker della conferenza organizzata a Interpoma 2022 presentano le loro soluzioni per la raccolta robotizzata delle mele
(Fonte foto: AgroNotizie)
Identikit del robot da raccolta
La ricerca nel campo della robotica si è adoperata per raggiungere una serie di obiettivi cardine, primo tra tutti, la realizzazione di macchine autonome in grado di equiparare la produttività umana. In altre parole, robot capaci di raccogliere lo stesso numero di mele raccolte manualmente da un operatore in un certo arco di tempo.
Questo ha portato alla realizzazione di robot che seppur diversi in forme, dotazioni e dimensioni, hanno alcuni aspetti in comune. Il principio di funzionamento, ad esempio, basato su elementi che simulano l'azione dell'arto umano per il distacco della mela dall'albero. Ecco perché l'architettura dei robot presentati durante il convegno è simile e così riassumibile:
- una struttura semovente che sorregge e alimenta l'intero sistema robotizzato e accumula le mele raccolte in appositi contenitori;
- una o più camere per il riconoscimento delle mele e l'individuazione degli ostacoli;
- uno o più strutture o "braccia" articolate che permettono al robot di potersi avvicinare con precisione al frutto;
- elementi prensili di tipo meccanico come pinze o dita a flagelli, o di tipo pneumatico come ventose che staccano attivamente il frutto.
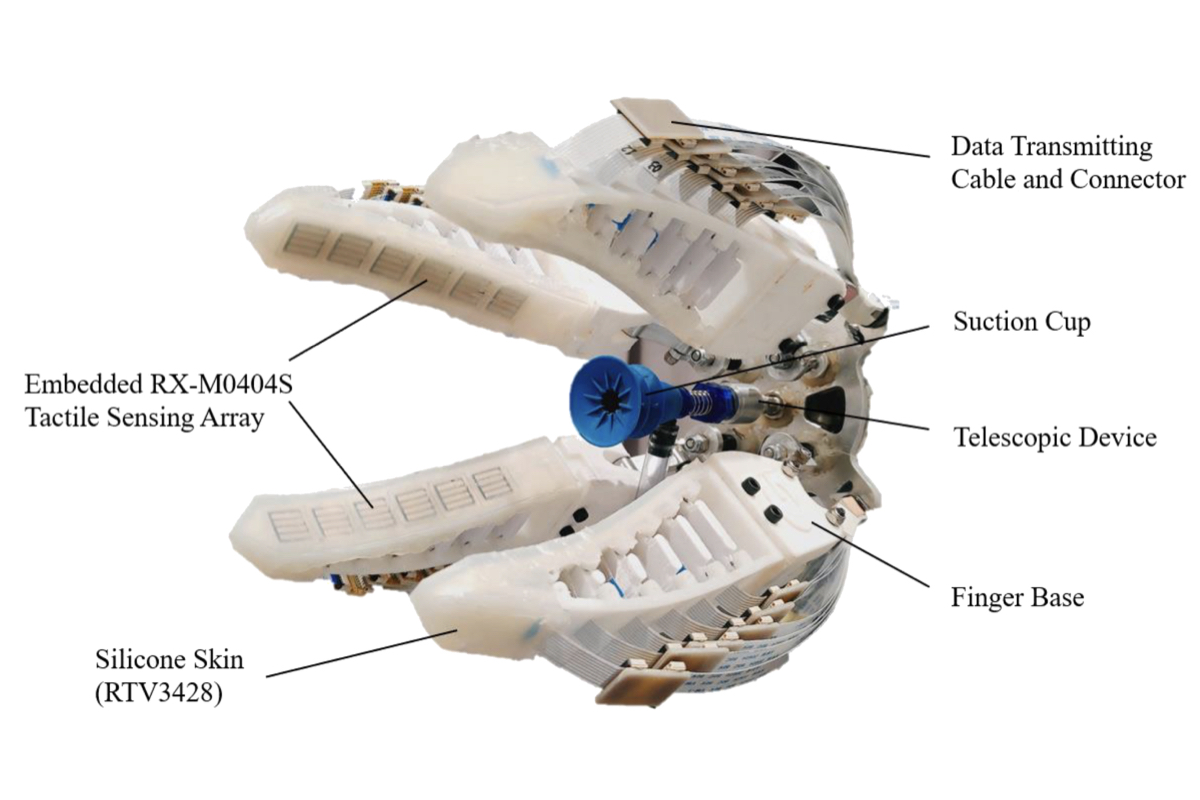
Le estremità prensili dei robot per il distacco del frutto agiscono mediante sottovuoto o torsione. In foto il prototipo di "mano" dell'università di Monash
(Fonte foto: Università di Monash)
Robot sotto i riflettori
Apprendimento continuo. Advance.farm, azienda statunitense famosa per i robot di raccolta fragole, ha presentato un robot a 6 braccia con elementi prensili, rotanti, a ventosa, montati su un carrello a propulsione elettrica ibrida in grado di avanzare autonomamente in filari da 2,75 a 3,5 metri di larghezza. Il robot identifica i frutti maturi grazie a fotocamere appositamente sviluppate e all'uso di tecnologie di Macchine Learning. La soluzione che raccoglie circa 1000 mele all'ora, stando alle previsioni dell'azienda, sarà disponibile sul mercato entro 2 o 3 anni.
Advance.farm sfrutta la realtà virtuale per sviluppare le capacità del suo robot
Robot made in italy. Aigritec, start up tutta italiana, ha sviluppato un robot di piccole dimensioni, attualmente equipaggiato con un solo braccio snodabile montato su un supporto scorrevole verticale, per operare a diverse altezze. Con una stereo camera e tramite AI riconosce le mele che vengono prelevate da una pinza a tre denti. Il frutto viene gentilmente bloccato e ruotato su se stesso per essere distaccato dalla pianta in circa in 6 secondi. In futuro, entro il 2025 secondo il fondatore, Aigritec arriverà sul mercato Europeo con un robot a 8 arti in grado di svolgere il lavoro di 4 persone.
Il robot della start up italiana all'opera in un meleto vicino a Bolzano
Un robot ormai completo. FFRobotics, Aziende Israeliana, ha proposto un robot ormai giunto alla sesta generazione, equipaggiato con 12 pistoni estensibili e liberi di muoversi orizzontalmente, disposti per ogni lato su tre livelli di altezza a coppie. Utilizzabili singolarmente o in coppia, quando utilizzati in coppia il primo monta una camera per il riconoscimento delle mele e l'altro ne esegue il distacco dalla pianta. Il distacco avviene sempre per rotazione del frutto. Il robot opera in filari tra i 3 e 4 metri con un tasso di raccolta intorno al 70% e un danno al prodotto raccolto inferiore al 5%.
Il robot da raccolta di FFRobotics mostra un elevata efficienza di raccolta
Pinza innovativa per la raccolta. Presso l'Università di Monash in Australia, un gruppo di ricerca ha sviluppato Mars, un prototipo di robot in grado raccogliere le mele in 9,5 secondi e con un tasso di successo del 70,8%. Il robot grazie a un algoritmo AI di pianificazione dei movimenti, in pochi secondi secondi ottimizza il percorso del braccio ed evita ostacoli e collisioni. Aspetto peculiare di questa soluzione è una pinza con quattro dita indipendenti dotate di sensori tattili e un sistema pneumatico che attira prima ed estrae poi le mele, riducendo al minimo i danni. L'università si è prefissa l'obbiettivo di commercializzare il robot entro il 2024.
Il robot dell'università di Monash è dotato di un braccio multi articolato
Vecchia macchina? No, un robot. Munckhof, azienda dei Paesi Bassi attiva nel settore delle macchine da raccolta per il frutteto, propone una soluzione ibrida che combina la raccolta meccanica e quella manuale. L'azienda utilizzando come base la sua Pluk-o-Track, struttura semovente per la raccolta con operatori umani, inserisce una serie di bracci meccanici con pinze prensili. Questa soluzione, per ora testata con una sola coppia di bracci, è upgradabile fino a 4 coppie per lato e arriverà in commercio entro il 2024. Ma non solo, l'azienda intende lanciare un kit per trasformare le vecchie macchine in robot dotandole del precedente sistema.
La macchina per la raccolta delle mele Pluk-o-Track può essere dotata di arti robotici aggiuntivi
Un robot per tutte le tasche. Ripe Robotics, start-up australiana, porta a Interpoma il suo prototipo caratterizzato da un costo ridotto e da una componentistica semplice da realizzare e assemblare. Il supporto semovente elettrico con ruote sterzanti è dotato di un particolare braccio a ypsilon rovesciata che termina con una ventosa rotante. L'approccio della Start-up punta a dotare le aziende di un numero elevato di questi robot con un numero limitato di bracci: massimo 4 a diverse altezze per la raccoglie contemporaneamente le mele su un solo lato del filare.
La semplicità costruttiva è alla base del robot della Ripe Robotics
Le macchine non volano, ma i robot sì. Tevel, Società israeliana, propone una soluzione diversa dalle precedenti. Se il sistema di interazione robot mela rimane la classica ventosa, ciò che cambia è l'assenza di braccia sostituite da una flotta di droni cablati in grado di avvicinarsi autonomamente in volo ai frutti in filari dai 2,8 ai 4,8 metri per un altezza massima di 4,5 metri. La complessità tecnica passa in secondo piano e assume grande importanza il software per il controllo di volo dei droni. Attualmente sull'ultimo prototipo, operano 8 droni. In futuro, agendo solo sul software, sarà possibile arrivare fino a 100 droni, spiegano dall'Azienda.
I droni di Tevel consentono un processo di raccolta meno rigido rispetto ai bracci meccanici
Robot nei frutteti?
Le soluzioni presentate sono ormai nelle ultime fasi di collaudo e quasi pronte per il mercato. Secondo le stime dei costruttori in 2 o 3 anni potremo arrivare ad un utilizzo su larga scala.
Rimangono aperte alcune sfide. Prima tra tutte, quella dell'efficienza. Seppur con ottimi risultati, i robot non raggiungono ancora la produttività di un operatore umano e, almeno nelle prime fasi, saranno necessari operatori specializzati che controllino l'operato dei robot e li posizionino correttamente nei filari.
Da non dimenticare la problematica relativa all'investimento, ancora molto alto per le aziende agricole. I produttori di robot intendono incentivare l'adozione dei loro sistemi offrendo pacchetti di noleggio con prezzi legati alle quantità raccolte. Ogni l'agricoltore dovrà essere in grado di identificare la tipologia di robot necessaria: le dimensioni sono diverse così come le possibilità applicative. Per le piccole realtà potrebbe essere interessante formare gruppi d'acquisto per ammortizzare i costi.
Raccolta e non solo
L'ingresso dei robot in frutticoltura non si limita alla raccolta. Molte aziende stanno sviluppando robot per la potatura o il diradamento oppure per l'applicazione degli agrofarmaci. Il tutto partendo dalla struttura base dei robot da raccolta: basi semoventi, camere per il riconoscimento dell'ambiente circostante e bracci articolati (o droni) sui quali sono montati diversi strumenti come forbici o micro irroratori per interventi precisi e puntuali.