

La robotica agricola vive un periodo di espansione e crescita: sono ormai numerosissimi i prototipi di robot in fase di sviluppo pronti o quasi a supportare gli agricoltori nelle più disparate operazioni. Ne è un esempio questo progetto per lo sviluppo di un robot per la raccolta delle mele.
Leggi anche Con questi robot la raccolta delle mele è completamente automatizzata
AurOrA acronimo di Autonomer Obstplantagen helfer Altes Land, questo il nome del progetto, è un piccolo mezzo semovente destinato a portare una maggiore automazione nei frutteti. In futuro, circolerà autonomamente tra i filari, individuando e prelevando casse piene di frutta per portarle al punto di scarico, alleggerendo il lavoro degli operatori addetti alla raccolta.
In aziende di piccole e medie dimensioni (fino a 10 ha), il veicolo può supportare attivamente la raccolta seguendo gli operatori in campo: una volta che la cassa è completamente riempita, il veicolo la allontana e ritorna con una vuota. In aziende più grandi il robot può fornire un supporto passivo riconoscendo autonomamente le casse piene lungo le file, prelevandole e trasportandole fino al punto di raccolta.

Il veicolo è progettato per prelevare e trasportare un cassone di grandi dimensioni dal peso di circa 350-400 chilogrammi
(Fonte foto: hochschule 21)
Un progetto in divenire
Il progetto - avviato nel febbraio 2020 in collaborazione con la Pwh, produttore locale di macchine agricole, e l'Università di Buxtehude (Hochschule 21 - Germania) - nasce da una richiesta pratica del frutticoltore Johann Schröder di Jork vicino ad Amburgo.
Lo sviluppo del robot è finanziato dal programma di sostegno ZIM del Ministero dell’Economia tedesco e sostenuto da Siko, azienda specializzata nella vendita di prodotti per automazione e robotica.
A febbraio 2021 è stata completata la progettazione del telaio e dei componenti. Ad aprile 2022 è stata ultimata la sensoristica per il rilevamento dell'ambiente circostante e nei mesi successivi quella per la navigazione autonoma. Infine, a gennaio 2023 è stato realizzato e testato in campo un primo prototipo funzionante.
Il primo prototipo di robot autonomo AurOrA per la raccolta delle casse di mele in campo
L'obiettivo del progetto nel medio periodo è quello di dare vita ad un prodotto commercializzabile ed economicamente vantaggioso in grado di fornire assistenza tecnica a tutti i frutticoltori.
Sensori alla base della robotica
Un veicolo autonomo necessita di numerosi sensori che assicurino un funzionamento corretto in ogni situazione. Questi devono essere innanzi tutto molto robusti e resistenti alle condizioni ambientali outdoor (fango, polvere, pioggia, irregolarità del terreno). Per il controllo dell’angolo di sterzata e della posizione del caricatore il progetto AurOrA utilizza 2 tipi di encoder Siko.
Leggi ancheIl mondo segreto dei sensori, silenziosi aiutanti a bordo
Il primo è installato nella parte posteriore del veicolo, dove si trova una doppia ruota sterzante. Si tratta di un encoder magnetico multigiro (WV5800M nel prototipo e WV58MR nei modelli futuri) capace di rilevare più rotazioni e dotato di interfaccia CANopen per l'utilizzo di componenti elettronici standard.
Questi encoder sono anche in grado di conservare l'angolo di sterzata in assenza di alimentazione, evitando malfunzionamenti al ripristino della tensione.

Il sensore posto sulle ruote sterzanti posteriori assicura un corretto movimento del robot in campo
(Fonte foto: hochschule 21)
Il secondo tipo di sensori si trova sui 4 caricatori responsabili del sollevamento delle casse piene di frutta e ne monitorano la posizione e il funzionamento. Uno per ogni pistone, i 4 encoder miniaturizzati monogiro (AH25S) sono di tipo analogico, più piccoli, semplici e compatti dei precedenti.
"Siamo felici di aver collaborato con Siko. All'inizio non sapevamo quali sensori utilizzare e quali fossero effettivamente gli esatti requisiti, ma li abbiamo elaborati e definiti insieme" commenta Alexander Kammann, collaboratore scientifico dell'Università di Buxtehude.
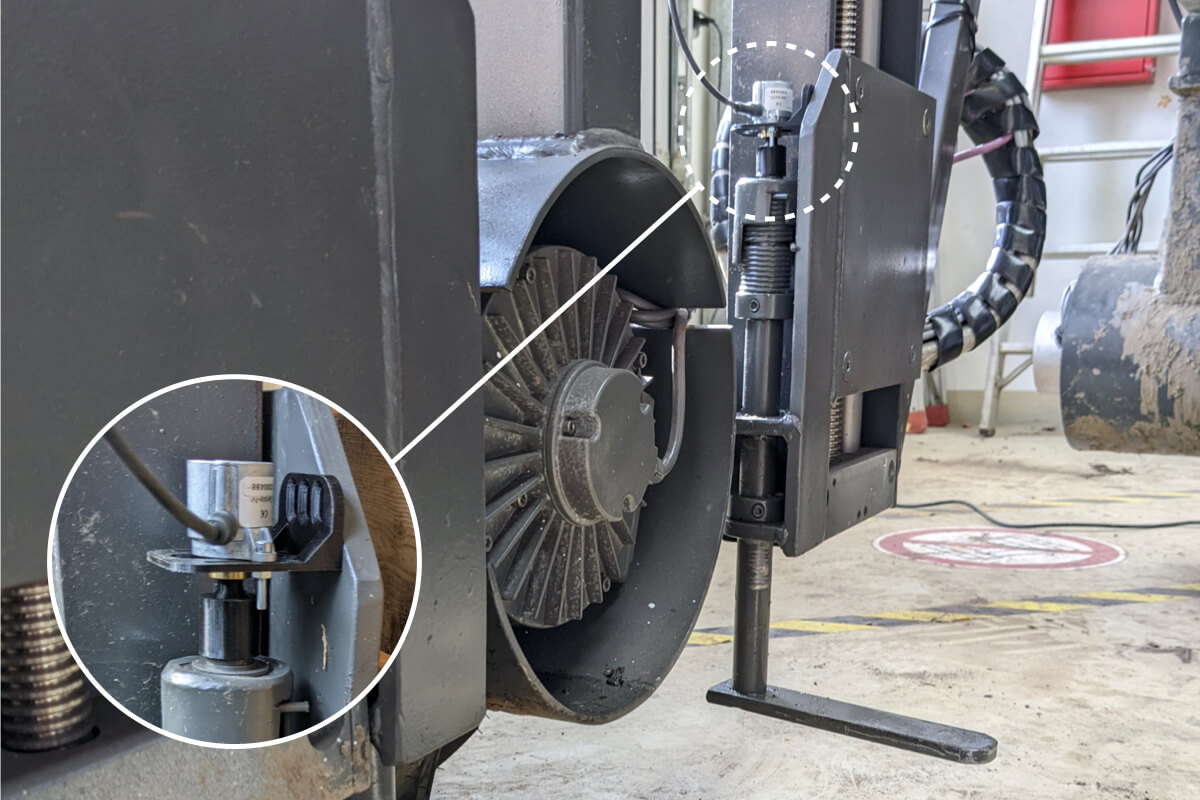
Il sensore posto sui bracci caricatori controlla che le casse di mele vangano sollevate correttamente
(Fonte foto: hochschule 21)
Un aiuto per la raccolta e non solo
Per poter offrire alle aziende agricole un reale valore aggiunto, è allo studio l’impiego di AurOrA anche per ulteriori operazioni come la pacciamatura e la falciatura o come supporto per la messa a dimora di nuove piante. Questo, oltre ad ammortizzare i costi complessivi di adozione, consentirebbe un utilizzo del robot lungo quasi tutto l’arco dell’anno e non limitato alla sola stagione del raccolto.
























