
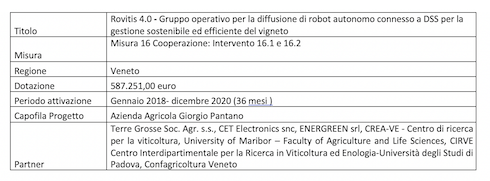
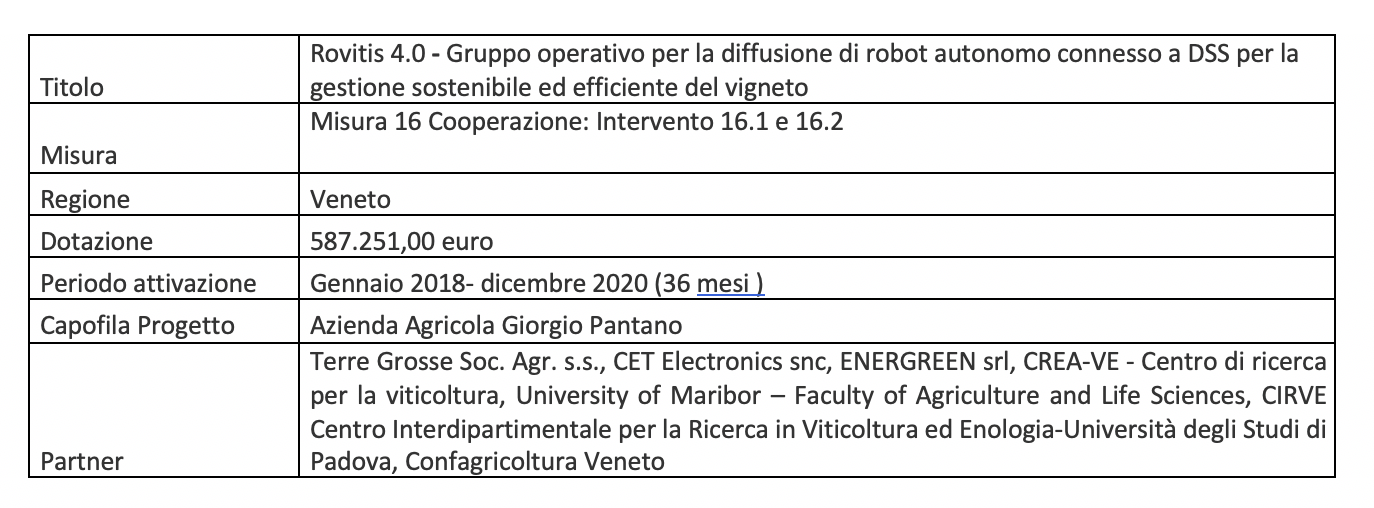
Un futuro diverso per le piccole e medie aziende viticole (con una superficie media di 3-4 ettari) del Veneto e non solo: questo è l'obiettivo del progetto Rovitis 4.0, un sistema altamente innovativo per il settore vitivinicolo che riguarda la gestione robotizzata del vigneto tramite un "dialogo" tra un mezzo robotico, sensoristica e un software Dss (Sistema di supporto alle decisioni). Il progetto, iniziato nel 2018 e che proseguirà fino a tutto il 2020 presso l'azienda agricola Giorgio Pantano di Candiana (Padova) e Terre Grosse soc. agr. s.s. di Zenson di Piave (Treviso), è finanziato da Psr della Regione Veneto 2014-2020.
Tutto parte dall'idea di realizzare un'azienda autogestita, grazie all'utilizzo interconnesso di sensori e di macchine in grado di eseguire lavorazioni in modo autonomo, capaci di intervenire in campo in base ai reali rischi a cui è soggetta la coltura e riducendo al minimo l'intervento del personale.
Tramite questo progetto si vuole dimostrare la fattibilità, l'efficacia e la sostenibilità economica e ambientale di questa gestione robotizzata del vigneto, in alternativa alla gestione tradizionale; tutto ciò porterà molteplici benefici per l'azienda agricola, con vantaggi economici, ambientali e sociali: ottimizza le risorse e riduce i costi di produzione delle uve, anche per aziende di dimensioni inferiori ai 20 ettari; minimizza l'impatto ambientale, grazie ad un uso razionale e mirato dei prodotti fitosanitari; riduce i rischi per la salute degli operatori nelle pratiche agricole.
Le attività del progetto hanno portato allo sviluppo di due robot prototipali con i quali si sta procedendo alla verifica tramite test in vigneto delle performance di guida automatica, della sicurezza, della corretta interazione robot-Dss, e dell'efficacia degli interventi in vigneto; inoltre si sta verificando la capacità del sistema robot+Dss di gestire in autonomia i trattamenti fitosanitari. Tutto questo naturalmente confrontato con le pratiche di gestione tradizionali in vigneto.
Il robot Rovitis riuscirà a trattare circa un ettaro per volta, con la capacità di rientrare per il rifornimento d'acqua e di lavorare fino a quindici ore autonomamente, per cui è possibile gestire anche superfici più ampie. La macchina ha una potenza di 40 CV, è piccola ed economica.
Il robot è dotato di sensori per calibrare le irrorazioni: è nato infatti per i trattamenti fitosanitari, ma è dotato anche di telecamera per rilevare la situazione fitosanitaria del vigneto (presenza di giallumi, volume della chioma, ecc.). Inoltre è collegato anche a una centralina meteo tramite Dss per entrare in azione quando indicato dalla centralina.
I risultati delle prove preliminari di guida autonoma del robot nell'azienda agricola Pantano svolte a luglio 2019 hanno evidenziato che Rovitis è capace di seguire un filare grazie al sensore Lidar che riconosce la distanza tra ostacoli individuando dove sono i filari del vigneto. Inoltre, la prova in campo di guida autonoma con irrorazione ha evidenziato come il robot, completato il filare, si giri e riesca a tornare verso il punto di partenza.
Un'altra importante dimostrazione si è svolta ad ottobre 2019 presso la società Terre Grosse con presente una delegazione polacca, Confagricoltura Veneto e tutti gli altri partner di progetto. In questo evento si è dimostrata in particolare l'applicazione della tecnologia "Computer vision" sia per l'irrorazione a rateo variabile, sia come ausilio alla guida autonoma.
Utilizzi futuri del robot potranno riguardare anche operazioni diverse dai trattamenti, come potare le viti, tagliare l'erba, vendemmiare, in una logica di viticoltura "lenta".
Per maggiori informazioni visita questo sito
Contatti per maggiori informazioni: giorgio.pantano@rovitis.com e nicola.vicino@cet-electronics.com
Clicca sull'immagine per ingrandirla
Le innovazioni della misura 16 del Psr
Piccoli progetti che cambiano dal basso l'agricoltura italiana
Tutto parte dall'idea di realizzare un'azienda autogestita, grazie all'utilizzo interconnesso di sensori e di macchine in grado di eseguire lavorazioni in modo autonomo, capaci di intervenire in campo in base ai reali rischi a cui è soggetta la coltura e riducendo al minimo l'intervento del personale.
Tramite questo progetto si vuole dimostrare la fattibilità, l'efficacia e la sostenibilità economica e ambientale di questa gestione robotizzata del vigneto, in alternativa alla gestione tradizionale; tutto ciò porterà molteplici benefici per l'azienda agricola, con vantaggi economici, ambientali e sociali: ottimizza le risorse e riduce i costi di produzione delle uve, anche per aziende di dimensioni inferiori ai 20 ettari; minimizza l'impatto ambientale, grazie ad un uso razionale e mirato dei prodotti fitosanitari; riduce i rischi per la salute degli operatori nelle pratiche agricole.
Le attività del progetto hanno portato allo sviluppo di due robot prototipali con i quali si sta procedendo alla verifica tramite test in vigneto delle performance di guida automatica, della sicurezza, della corretta interazione robot-Dss, e dell'efficacia degli interventi in vigneto; inoltre si sta verificando la capacità del sistema robot+Dss di gestire in autonomia i trattamenti fitosanitari. Tutto questo naturalmente confrontato con le pratiche di gestione tradizionali in vigneto.
Il robot Rovitis riuscirà a trattare circa un ettaro per volta, con la capacità di rientrare per il rifornimento d'acqua e di lavorare fino a quindici ore autonomamente, per cui è possibile gestire anche superfici più ampie. La macchina ha una potenza di 40 CV, è piccola ed economica.
Il robot è dotato di sensori per calibrare le irrorazioni: è nato infatti per i trattamenti fitosanitari, ma è dotato anche di telecamera per rilevare la situazione fitosanitaria del vigneto (presenza di giallumi, volume della chioma, ecc.). Inoltre è collegato anche a una centralina meteo tramite Dss per entrare in azione quando indicato dalla centralina.
I risultati delle prove preliminari di guida autonoma del robot nell'azienda agricola Pantano svolte a luglio 2019 hanno evidenziato che Rovitis è capace di seguire un filare grazie al sensore Lidar che riconosce la distanza tra ostacoli individuando dove sono i filari del vigneto. Inoltre, la prova in campo di guida autonoma con irrorazione ha evidenziato come il robot, completato il filare, si giri e riesca a tornare verso il punto di partenza.
Un'altra importante dimostrazione si è svolta ad ottobre 2019 presso la società Terre Grosse con presente una delegazione polacca, Confagricoltura Veneto e tutti gli altri partner di progetto. In questo evento si è dimostrata in particolare l'applicazione della tecnologia "Computer vision" sia per l'irrorazione a rateo variabile, sia come ausilio alla guida autonoma.
Utilizzi futuri del robot potranno riguardare anche operazioni diverse dai trattamenti, come potare le viti, tagliare l'erba, vendemmiare, in una logica di viticoltura "lenta".
Per maggiori informazioni visita questo sito
Contatti per maggiori informazioni: giorgio.pantano@rovitis.com e nicola.vicino@cet-electronics.com
Clicca sull'immagine per ingrandirla
Le innovazioni della misura 16 del Psr
Piccoli progetti che cambiano dal basso l'agricoltura italiana
© AgroNotizie - riproduzione riservata
Fonte: Agronotizie
























